Alex Beaudin

I'm Alex, a 2nd-year PhD student in Robotics & Control at UC Berkeley, working in Professor Murat Arcak's group. Before joining UC Berkeley, I completed my B.Sc. in Physics and Computer Science at McGill University. My undergraduate thesis on multi-robot exploration was supervised by Prof. Greg Dudek, and I am grateful to have conducted research under the supervision of Prof. Hsiu-Chin Lin and Prof. James Richard Forbes.
My research focus alternates between data-driven control methods using Gaussian Processes, and multi-agent systems. I am particularly interested in combining the guarantees of control with the accuracy and generality of data-driven methods. My current research thrusts include:
- using Gaussian Processes to learn unmodeled dynamics,
- adapting reinforcement learning for high-dimensional action spaces,
- and coordinating heterogeneous agents for ocean monitoring.
Reach out if you'd like to collaborate or have any questions about my work!
- Email: a [dot] b [at] berkeley [dot] edu
Recent Work
-
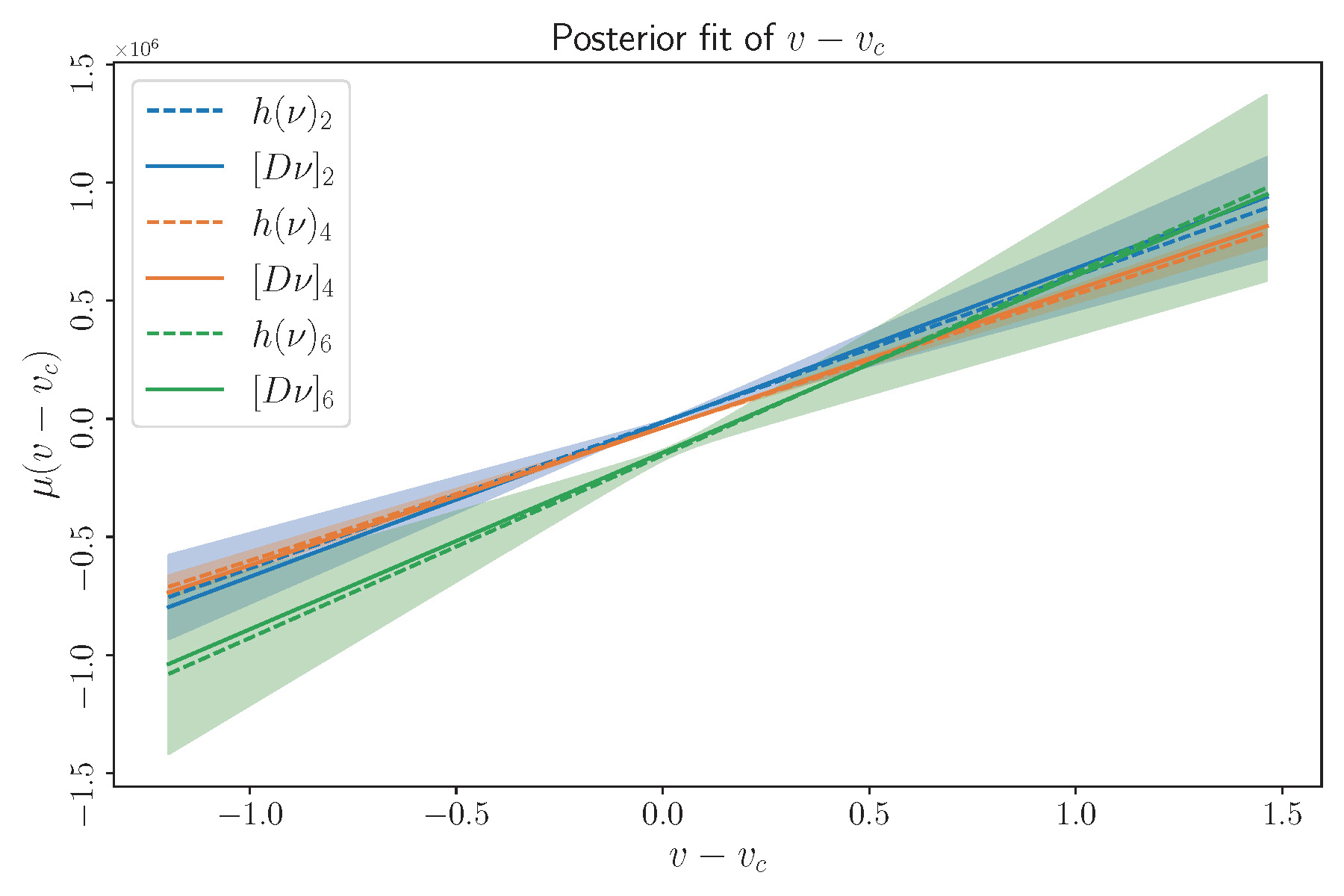 Gaussian Process Regression for Physics-Informed State Space Models
Gaussian Process Regression for Physics-Informed State Space ModelsAlex Beaudin, Paul Griffioen, and Murat Arcak
Preprint, 2025
-
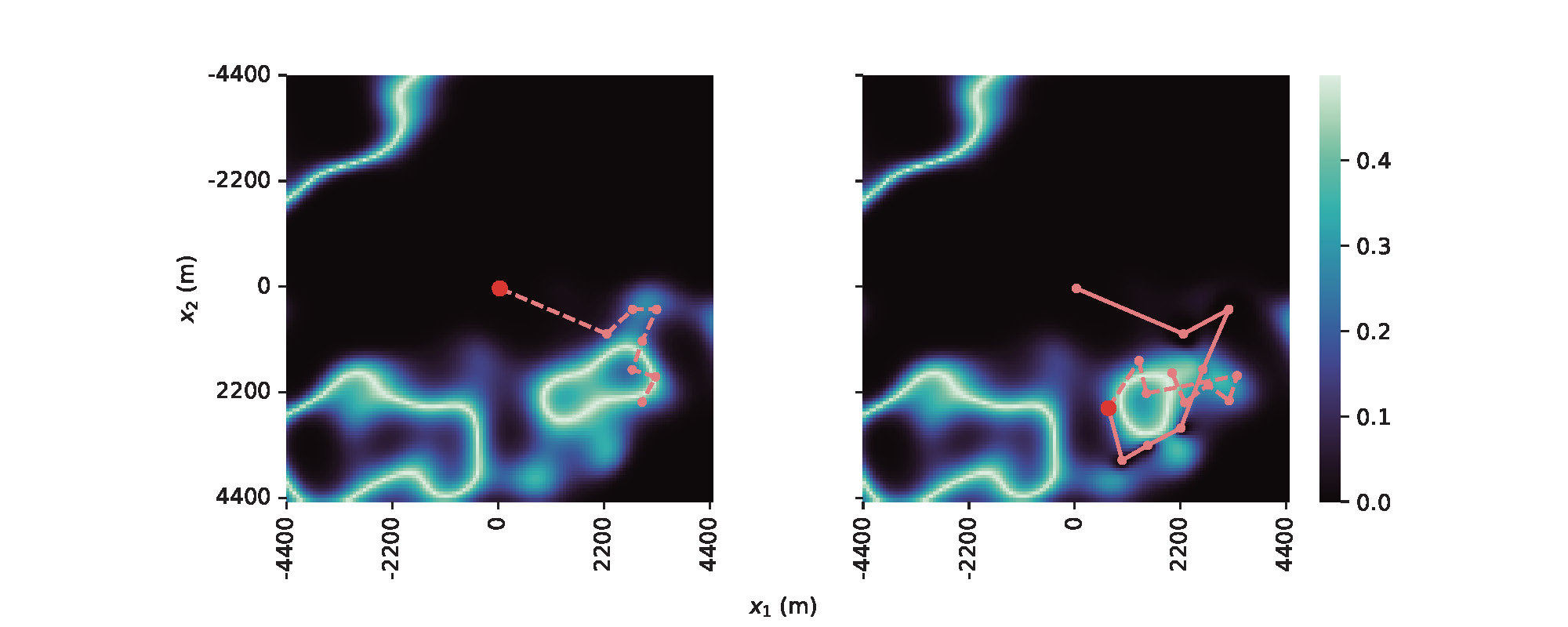 Online Gaussian Process Learning and Posterior Optimization for Path Planning in a Multi-Agent Observation System
Online Gaussian Process Learning and Posterior Optimization for Path Planning in a Multi-Agent Observation SystemAlex Beaudin*, Bjørn Andreas Kristiansen*, Murat Arcak, and Tor Arne Johansen
Preprint, 2024
-
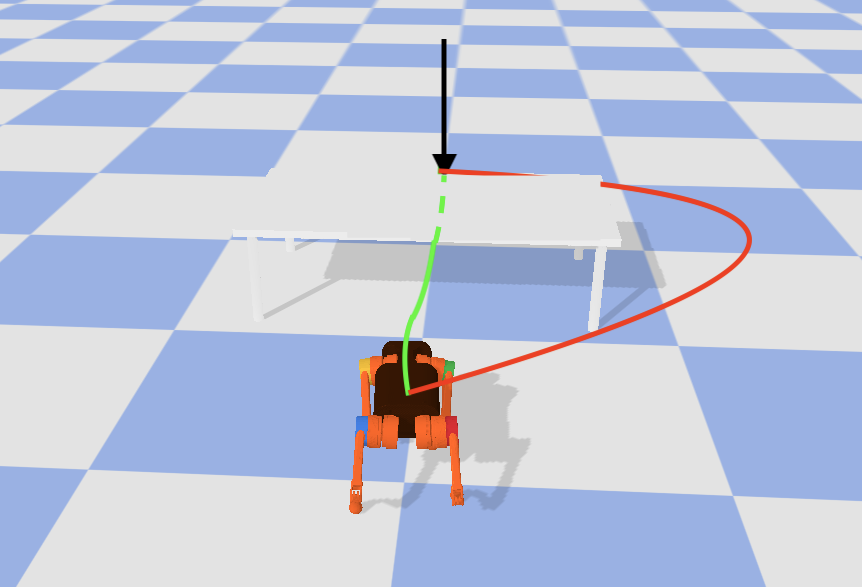 Learning Agile Paths from Optimal Control
Learning Agile Paths from Optimal ControlAlex Beaudin and Hsiu-Chin Lin
Conference on Robot Learning: Workshop on Agile Locomotion, 2022
Recent Projects
-
 View on GitHub →
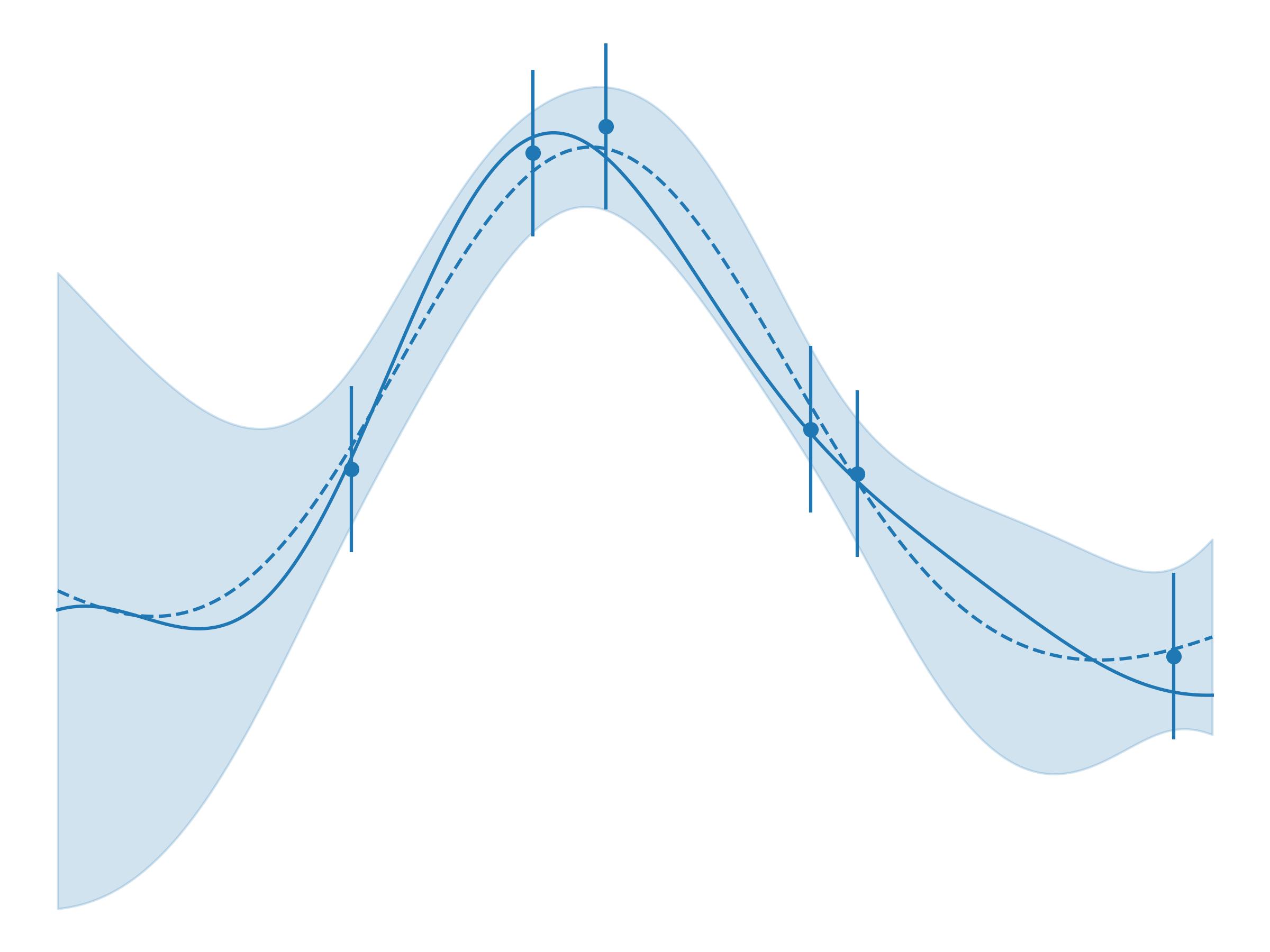
View on GitHub →GGPY
A Gaussian Process library for research written in Python.